SLAM——Lidar简介
理解传感器的原理对于更好地理解激光SLAM在做什么有很大的帮助。例如在LOAM中,会提到直接得到的点云是distorted,这就和雷达的原理有关系,雷达扫描一圈是需要时间的,而我们会把扫描一圈的结果当作一个Frame,很明显如果雷达是运动状态,那么这个点云是有扰动的。 ### Lidar测距原理
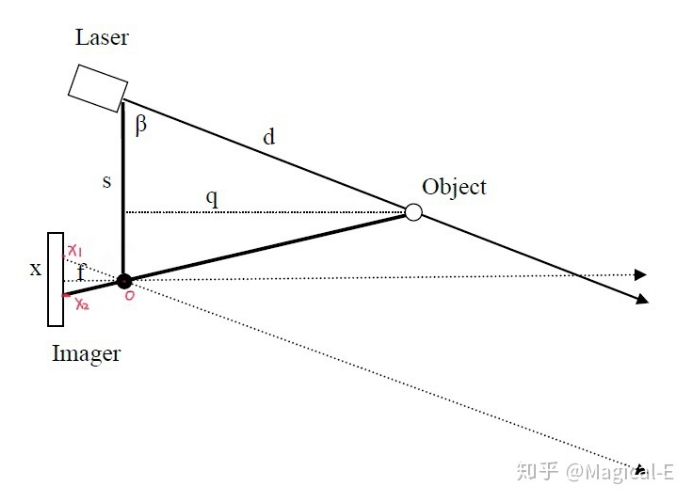
Laser是发射器,而Imager是接收器,通过几何关系可以得到:\(d=\frac{s f}{x \sin \beta}\). 通过旋转360度,就可以得到一周的障碍物的距离了(使用这样的方法测量距离有范围,如果Imager收不到返回的信号就无法得到距离信息)。
多线雷达数据的采集
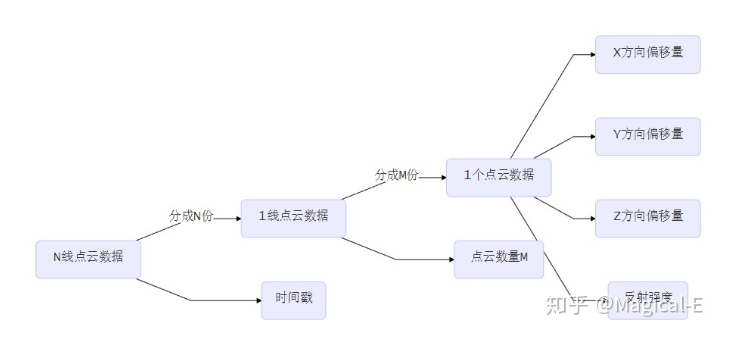
由于需要旋转一周来采集,因此采集的点之间需要进行去扰动,如何去扰动?将一圈的扫描投影到同一个时间戳上来得到点云。