压缩感知与稀疏模型——Proximal Gradient
实际上这节课讲的内容也比较多,对应的是convex optimization,这里主要介绍一下lasso回归以及对应使用的Proximal Gradient Decent(PGD)。
Lasso Regression
之前提到,对于\(l^0\)范数问题,用来求解最稀疏的解,我们可以将最小化\(l^0\)范数放松到最小化\(l^1\)范数。假如现在有下面的问题: \[ \text{minimize }\Vert x \Vert_1\\ \text{subject to } Ax = y. \] 这个问题是著名的BP(Basic Pursuit)问题,它的另外一个版本是考虑了高斯噪声:\(y = Ax_0 + z\),将这个问题的限制用一个惩罚函数\(f(x) = \frac {1}{2} \Vert y-Ax \Vert_2^2\)代替,可以得到下面的解决策略: \[ \min_x \frac{1}{2} \Vert y - Ax \Vert ^2_2 + \lambda \Vert x\Vert_1 \] 这就是著名的Lasso回归。
之前学习的优化方法大多数是对于\(l^2\)范数的优化,因为它处处可导。而\(l^1\)范数虽然也是凸函数,但是却不是平滑函数,在局部会出现不可导的情况。
除此之外,有着类似形式的问题还有低秩矩阵的恢复问题。我们希望恢复低秩矩阵\(L_0\),能观察到的量为\(Y = L_0 + S_0\)。一个常用的方法是解决PCP(principal component pursuit)问题: \[ \begin{array}{cl}{ {\operatorname{minimize} } }& {\|\boldsymbol{L}\|_ {*}+\lambda\|\boldsymbol{S}\|_{1} } \\ {\text { subject to } } & {\boldsymbol{L}+\boldsymbol{S}=\boldsymbol{Y} } \end{array} \] 如果数据中包含噪声,那么一个更稳定的版本为: \[ \operatorname{minimize} \frac{1}{2}\|\boldsymbol{Y}-\boldsymbol{L}-\boldsymbol{S}\|_{F}^{2}+\lambda_{1}\|\boldsymbol{L}\|_{*}+\lambda_{2}\|\boldsymbol{S}\|_{1} \] ### Proximal Gradient Methods
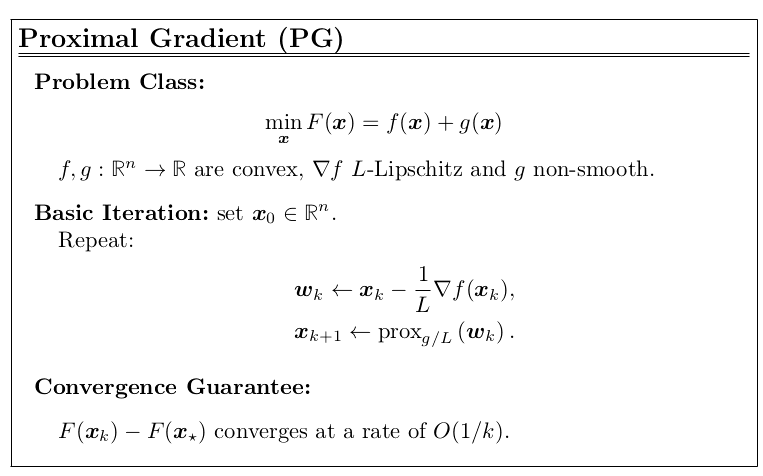
实际上,我们会遇到很多类似于lasso回归一样的优化问题,它们都有着下面的形式: \[ F(x) = f(x) + g(x) \] 其中\(f(x)\)是一个平滑的凸函数,而\(g(x)\)是一个凸函数但是却不是平滑的。在上面提到的Lasso问题中: \[ f(x) = \frac{1}{2} \Vert y - Ax \Vert ^2_2, g(x) = \lambda \Vert x\Vert_1. \] 我们希望能找到一种快速的方法来解决这样的优化问题。
首先,由于局部不可导,因此我们没法使用梯度下降,最容易想到的是使用subgradient(次梯度)。
使用次梯度下降: \[ x_{k+1} = x_k - \gamma_k g_k, g_k \in \partial F(x_k) \] 实际上是可以解决Lasso问题的,但是主要缺点是收敛得太慢了。一般来说,次梯度的收敛速率对于非平滑的目标函数是: \[ F(x_k) - F(x_*) = O(\frac{1}{\sqrt k}) \] #### convergence rates of first order methods
这部分内容介绍一下一般梯度下降(使用一阶导数)的收敛速度是\(O(\frac{1}{k})\)。对于convex函数来说,一阶导数估计实际上提供的是一个下界。
我们知道梯度下降每次迭代规律为: \[ x_{k+1} = x_k - \gamma_k \nabla f(x_k) \] 而迭代后的代入\(f\)真实值,实际上是大于根据梯度估计的值的: \[ f(x') \ge f(x) + \langle\nabla f(x),x'-x\rangle \] 梯度越大,步子就可以迈得更大一点,因为对于平滑函数来说,这意味着距离最低点还更远一点。引入新的概念:L-Lipschitz gradient,如果一个函数满足: \[ \Vert \nabla f(x_1) - \nabla f(x_2)\Vert \leq L\Vert x_1 - x_2\Vert, \forall x_1,x_2 \in \mathbb R^n \] \(L>0\),那么这个\(L\)被称为Lipschitz常量。有了这个条件,我们可以给线性下界补充一个二次上界。
引理:
如果\(f\)是可导函数,而且\(\nabla
f\)满足L-Lipschitz,那么对于任意\(x,x’\)有 \[
f(x') \leq f(x) + \langle\nabla f(x),x'-x\rangle +
\frac{L}{2}\Vert x' - x \Vert _2^2
\] 证明上面的结论: \[
\begin{aligned} f\left(\boldsymbol{x}^{\prime}\right)
&=f\left.\left(\boldsymbol{x}+t\left(\boldsymbol{x}^{\prime}-\boldsymbol{x}\right)\right)\right|_{t=1}
\\ &=f(\boldsymbol{x})+\int_{t=0}^{1} \frac{d}{d t}
f\left(\boldsymbol{x}+t\left(\boldsymbol{x}^{\prime}-\boldsymbol{x}\right)\right)
d t \\ &=f(\boldsymbol{x})+\int_{t=0}^{1}\left\langle\nabla
f\left(\boldsymbol{x}+t\left(\boldsymbol{x}^{\prime}-\boldsymbol{x}\right)\right),
\boldsymbol{x}^{\prime}-\boldsymbol{x}\right\rangle d t \\
&=f(\boldsymbol{x})+\left\langle\nabla f(\boldsymbol{x}),
\boldsymbol{x}^{\prime}-\boldsymbol{x}\right\rangle \\ &
\quad+\int_{t=0}^{1}\left\langle\nabla
f\left(\boldsymbol{x}+t\left(\boldsymbol{x}^{\prime}-\boldsymbol{x}\right)\right)-\nabla
f(\boldsymbol{x}), \boldsymbol{x}^{\prime}-\boldsymbol{x}\right\rangle d
t \\ & \leq f(\boldsymbol{x})+\left\langle\nabla f(\boldsymbol{x}),
\boldsymbol{x}^{\prime}-\boldsymbol{x}\right\rangle+\frac{L}{2}\left\|\boldsymbol{x}^{\prime}-\boldsymbol{x}\right\|_{2}^{2}
\end{aligned}
\] 所以我们可以得到: \[
f\left(\boldsymbol{x}^{\prime}\right) \leq
\hat{f}\left(\boldsymbol{x}^{\prime}, \boldsymbol{x}\right) \doteq
f(\boldsymbol{x})+\left\langle\nabla f(\boldsymbol{x}),
\boldsymbol{x}^{\prime}-\boldsymbol{x}\right\rangle+\frac{L}{2}\left\|\boldsymbol{x}^{\prime}-\boldsymbol{x}\right\|_{2}^{2}
\] 如果我们想要最小化这个上界,可以得到: \[
\arg\min _{x'} \hat f(x',x) = x - \frac{1}{L} \nabla f(x).
\]
这就是一个很简单的梯度下降迭代。而且可以保证,这样的迭代不会增加目标函数的值,因为\(\hat f(x,x) = f(x)\): \[
f\left(\boldsymbol{x}_{\star}^{\prime}\right) \leq
\hat{f}\left(\boldsymbol{x}_{\star}^{\prime}, \boldsymbol{x}\right) \leq
\hat{f}(\boldsymbol{x}, \boldsymbol{x})=f(\boldsymbol{x})
\] 可以证明的是,使用这种迭代方法到最佳值的收敛速度是: \[
f\left(\boldsymbol{x}_{k}\right)-f\left(\boldsymbol{x}_{\star}\right)
\leq
\frac{L\left\|\boldsymbol{x}_{0}-\boldsymbol{x}_{\star}\right\|_{2}^{2}
}{2 k}=O(1 / k)
\] 这个收敛速度会比次梯度要快很多。
From gradient to proximal gradient
实际上,我们可以从上面的梯度下降算法来获得一点启发,来设计一个算法优化lasso回归这类的问题: \[ F(x) = f(x) + g(x). \] 因为原函数是不可导的,因此梯度下降算法不能直接使用。尽管如此,如果目标函数中平滑的那一项\(f(x)\)的导数\(\nabla f\)是Lipschitz,我们依然可以构造出一个\(F\)的简单上界:对平滑项\(f\)放大到上界,对于不可导项就什么也不做: \[ \hat{F}\left(\boldsymbol{x}^{\prime}, \boldsymbol{x}\right)=f(\boldsymbol{x})+\left\langle\nabla f(\boldsymbol{x}), \boldsymbol{x}^{\prime}-\boldsymbol{x}\right\rangle+\frac{L}{2}\left\|\boldsymbol{x}^{\prime}-\boldsymbol{x}\right\|_{2}^{2}+g\left(\boldsymbol{x}^{\prime}\right) \] 不断地最小化上式,可以得到类似于之前的梯度下降算法,这样的算法比次梯度下降有更好的收敛率。因此,我们要做的就是最小化\(\hat F\): \[ \boldsymbol{x}_{k+1}=\arg \min _{\boldsymbol{x} } \hat{F}\left(\boldsymbol{x}, \boldsymbol{x}_{k}\right) \] 将\(x_k\)带入后补充全式,我们可以得到: \[ \hat{F}\left(\boldsymbol{x}, \boldsymbol{x}_{k}\right)=\frac{L}{2}\left\|\boldsymbol{x}-\left(\boldsymbol{x}_{k}-\frac{1}{L} \nabla f\left(\boldsymbol{x}_{k}\right)\right)\right\|_{2}^{2}+g(\boldsymbol{x})+h\left(\boldsymbol{x}_{k}\right) \] 这里的\(h(x_k)\)只与\(x_k\)有关,因此每次迭代就变成了: \[ \begin{aligned} \boldsymbol{x}_{k+1} &=\arg \min _{\boldsymbol{x} } \frac{L}{2}\left\|\boldsymbol{x}-\left(\boldsymbol{x}_{k}-\frac{1}{L} \nabla f\left(\boldsymbol{x}_{k}\right)\right)\right\|_{2}^{2}+g(\boldsymbol{x}) \\ &=\arg \min _{\boldsymbol{x} } g(\boldsymbol{x})+\frac{L}{2}\left\|\boldsymbol{x}-\boldsymbol{w}_{k}\right\|_{2}^{2} \end{aligned} \] 这里的\(\boldsymbol{w}_{k}=\boldsymbol{x}_{k}-(1 / L) \nabla f\left(\boldsymbol{x}_{k}\right)\)。也就是,我们希望让\(g\)尽量小,同时\(x\)又不要离\(w_k\)太远。由于二范数是凸函数,因此它总会有一个唯一最优解。
分析到这里,这个式子还是一个\(F(x) = f(x) + g(x)\)的形式,但是这里的\(f(x)\)是二次方(quadratic)的。这样形式在凸优化中经常会遇到,它有个特殊的名字——近端(Proximal Operator): \[ \operatorname{prox}_{g}(\boldsymbol{w}) \doteq \arg \min _{\boldsymbol{x} }\left\{g(\boldsymbol{x})+\frac{1}{2}\|\boldsymbol{x}-\boldsymbol{w}\|_{2}^{2}\right\} \] 因此迭代步骤可以写为: \[ \boldsymbol{x}_{k+1}=\operatorname{prox}_{g / L}\left(\boldsymbol{w}_{k}\right). \] 比较幸运的是,一般我们遇到的凸函数,他们的近端都是有着固定的形式,或者可以很高效地被计算出来,下面将会举几个例子:
- \(g(x) = I_D\),指示函数,也就是对于一个凸集\(D\),如果\(x\in D\),\(I_D(x) = 0\),否则\(I_D(x) = \infty\)。那么: \[\operatorname{prox}_{g}(\boldsymbol{w})=\arg \min _{\boldsymbol{x} \in \mathcal{D} }\|\boldsymbol{x}-\boldsymbol{w}\|_{2}^{2}=\mathcal{P}_{\mathcal{D} }[\boldsymbol{w}]\]
- \(g(\boldsymbol{x})=\lambda|\boldsymbol{x}|_{1}\),\(l^1\)范数: \[ \operatorname{prox}_{g}\left(u_{i}\right)=\operatorname{soft}\left(u_{i}, \lambda\right) \doteq \operatorname{sign}\left(u_{i}\right) \max \left(\left|u_{i}\right|-\lambda, 0\right)\]
- \(g(\boldsymbol{x})=\lambda|\boldsymbol{X}|_{*}\),矩阵核范数,那么: \[ \operatorname{prox}_{g}(\boldsymbol{W})=\mathcal{S}(\boldsymbol{W}, \lambda) \doteq \boldsymbol{U} \operatorname{soft}(\boldsymbol{\Sigma}, \lambda) \boldsymbol{V}^{*} \] \((\boldsymbol{U}, \boldsymbol{\Sigma}, \boldsymbol{V})\)是\(\mathbf W\)的SVD分解。
由以上这些,我们可以得到一个收敛速率为\(O(\frac{1}{K})\)的Proximal
Gradient算法。更正式的定理如下:
\(F(x) = f(x) + g(x)\),其中\(f\)是一个可导凸函数,并且导数符合Lipschitz,\(g\)是一个凸函数,考虑下面的迭代方式: \[
\boldsymbol{w}_{k} \leftarrow \boldsymbol{x}_{k}-\frac{1}{L} \nabla
f\left(\boldsymbol{x}_{k}\right), \quad \boldsymbol{x}_{k+1} \leftarrow
\operatorname{prox}_{g / L}\left(\boldsymbol{w}_{k}\right).
\] 假设\(F(x)\)在\(x^*\)有最小值,那么对于任何\(k>1\),都有: \[
F\left(\boldsymbol{x}_{k}\right)-F\left(\boldsymbol{x}_{\star}\right)
\leq
\frac{L\left\|\boldsymbol{x}_{0}-\boldsymbol{x}_{\star}\right\|_{2}^{2}
}{2 k}
\] 因此,我们得到近端梯度下降:
对于不同的目标函数,因为有着不同的近端形式,它们的近端梯度算法在具体形式上也略微有所不同,因此下面介绍几种针对不同问题的具体的近端梯度下降算法。
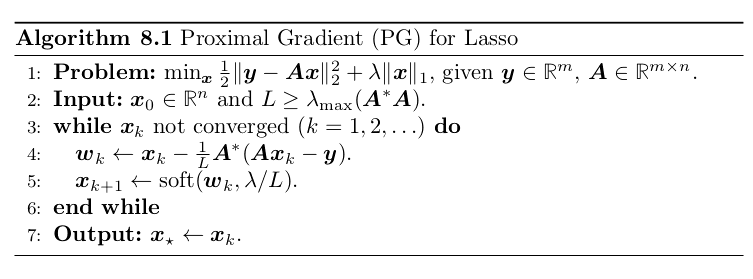
- Proximal Gradient for the Lasso
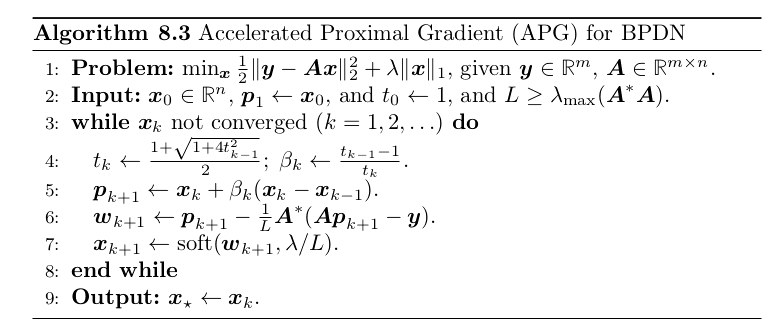
Lasso的\(g\)是\(l^1\)范数形式,而它的\(L\)可以是矩阵\(A^TA\)的最大特征值,s 可以提前计算得到的。有时候对于Lasso的PGD算法又被称为ISTA(iterative soft-thresholding algorithm),具体算法流程如下图:
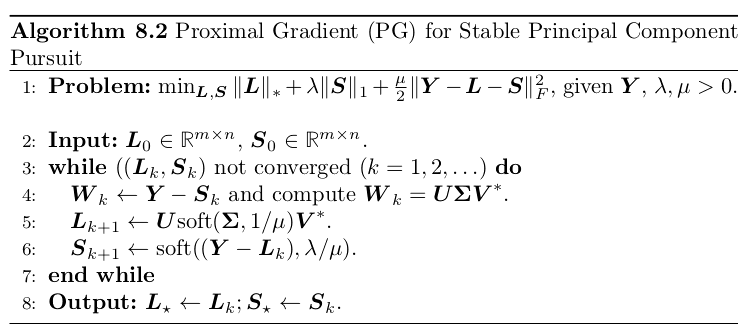
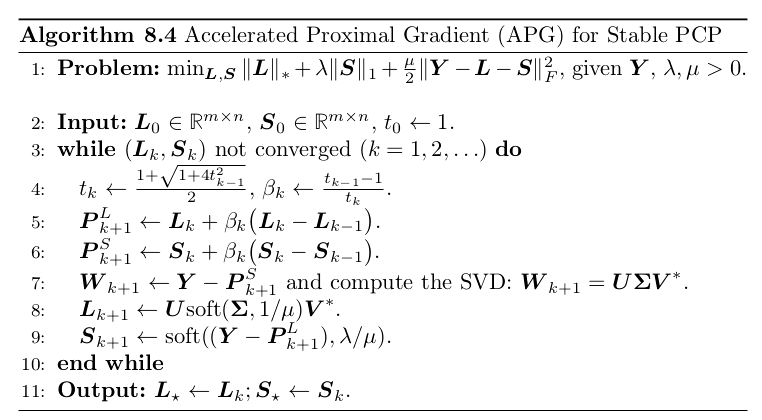
- Proximal Gradient for Stable PCP
观察之前不同形式的近端操作,可以看到对核范数\(\Vert X\Vert_*\)也是有y一个简单的近端形式的。因此我们可以用PGD来解决恢复低秩矩阵的问题,比如稳定主成分追踪(stable principal
component pursuit,PCP): \[\min _{L, S}\|\boldsymbol{L}\|_{*}+\lambda\|\boldsymbol{S}\|_{1}+\frac{\mu}{2}\|\boldsymbol{Y}-\boldsymbol{L}-\boldsymbol{S}\|_{F}^{2}\] 上式中有两个不可导项:\[ \|\boldsymbol{L}\|_{*}+\lambda\|\boldsymbol{S}\|_{1}\] 各自都有比较简单的近端形式。我们还需要知道下面的内容,假设\(\boldsymbol{x}=\left[\boldsymbol{x}_{1} ; \boldsymbol{x}_{2}\right] \text {, } g(\boldsymbol{x})=g_{1}\left(\boldsymbol{x}_{1}\right)+g_{2}\left(\boldsymbol{x}_{2}\right)\),那么: \[\operatorname{prox}_{g}(\boldsymbol{w})=\left(\operatorname{prox}_{g_{1} }\left(\boldsymbol{w}_{1}\right), \operatorname{prox}_{g_{2} }\left(\boldsymbol{w}_{2}\right)\right)\] 对于该问题的具体优化算法如下图:
Accelerate Proximal Gradient(APG)
之前的PG算法可以让收敛速度达到\(O(\frac{1}{k})\),但是如果我们需要解决的问题有更特殊的结构,可以生成更高效快速的梯度算法。在1970~1980年这段日子里,有很多俄国的优化理论学者,再思考一个问题:对于优化一个平滑函数\(f\),梯度方法是不是一阶方法里最佳的优化方法(这里局限于一阶方法,二阶方法有更快的收敛速度,但是我们也知道,二阶方法需要求海森矩阵,而高维情况下对海森矩阵的求解需要很大的代价)?
为了回答这个问题,首先需要一个计算模型。他们提出一个黑盒模型:模型中,算法会产生一个迭代序列\(x_0,….,x_k\)。对应于每个迭代,又会有对应的值\(f(x_i)\)以及梯度\(\nabla f(x_i)\)。通过这些来产生下一个迭代值,也就是: \[ \boldsymbol{x}_{k+1}=\varphi_{k}\left(\boldsymbol{x}_{0}, \ldots, \boldsymbol{x}_{k}, f\left(\boldsymbol{x}_{0}\right), \ldots, f\left(\boldsymbol{x}_{k}\right), \nabla f\left(\boldsymbol{x}_{0}\right), \ldots, \nabla f\left(\boldsymbol{x}_{k}\right)\right) \] 从上述模型中,我们可以从最坏的角度来研究。首先,固定一类函数\(\mathcal F\),然后观察这个算法在最差的函数下能做到什么样子(这里更像是最好的情况下,sup上界,inf为下界): \[ \sup _{f \in \mathcal{F}, \boldsymbol{x}_{0} }\left\{f\left(\boldsymbol{x}_{k}\right)-\inf _{\boldsymbol{x} } f(\boldsymbol{x})\right\} \] 对于我们感兴趣的一类函数,也就是可导凸函数并且满足Lipschitz条件: \[ \mathcal{F}_{L, r} \doteq\left\{f : \mathfrak{B}(0, r) \rightarrow \mathbb{R} |\left\|\nabla f(\boldsymbol{x})-\nabla f\left(\boldsymbol{x}^{\prime}\right)\right\| \leq L\left\|\boldsymbol{x}-\boldsymbol{x}^{\prime}\right\| \forall \boldsymbol{x}, \boldsymbol{x}^{\prime} \in \mathfrak{B}(0, r)\right\} \] 仅仅使用梯度下降也就是\(O(\frac 1 k)\)的收敛速度,我们有: \[ \sup _{f \in \mathcal{F}_{L, r}, \boldsymbol{x}_{0} }\left\{f\left(\boldsymbol{x}_{k}\right)-\inf _{\boldsymbol{x} } f(\boldsymbol{x})\right\} \leq \frac{C L r^{2} }{k} \] 而对于这类函数,可以证明的最好的下界是: \[ \sup _{f \in \mathcal{F}_{L, r}, x_{0} }\left\{f\left(\boldsymbol{x}_{k}\right)-\inf _{\boldsymbol{x} } f(\boldsymbol{x})\right\} \geq \frac{c L r^{2} }{k^{2} } \] 可以看到这之间还是有一个gap的。因此更快的收敛速度还是有可能做到的。
首先考虑比较简单的迭代方式,依然使用梯度下降: \[ x_{k+1} = x_k - \alpha \nabla f(x_k), \] 这里的\(\alpha\)是学习率,对于梯度符合Lipschitz条件的函数,取\(\alpha = \frac{1}{L}\)是一个很好的选择,而梯度\(\nabla f(x_k)\)是下降速度最快的方向。但是朝着当前最快的方向走并不一定就是最优的,因为梯度是局部的,因此梯度下降实际上是贪心算法,但是贪心算法不一定是最优的,另外一种保守的做法是参考之前迭代的方向,保留之前迭代的动量(momentum),被称为重量球方法: \[ \boldsymbol{x}_{k+1}=\boldsymbol{x}_{k}-\alpha \nabla f\left(\boldsymbol{x}_{k}\right)+\beta\left(\boldsymbol{x}_{k}-\boldsymbol{x}_{k-1}\right) \] 重量球方法往往会带来更平滑的迭代策略以及更快的收敛。
1983年,Yuri Nesterov提出了达到收敛速度为\(O(\frac{1}{k^2})\)的算法。在算法中,他也使用到了动量这个步骤。它引入了一个新的辅助点(auxiliary point)\(p_{k+1}\): \[ \boldsymbol{p}_{k+1} \doteq \boldsymbol{x}_{k}+\beta_{k}\left(\boldsymbol{x}_{k}-\boldsymbol{x}_{k-1}\right) \] 而每一次迭代步骤就是: \[ \boldsymbol{x}_{k+1}=\boldsymbol{p}_{k+1}-\alpha \nabla f\left(\boldsymbol{p}_{k+1}\right) \] 这里\(\alpha =\frac{1}{L}\),而\(\beta _k\)的值要仔细选择,来达到最佳的收敛率: \[ t_{k}=\frac{1+\sqrt{1+4 t_{k-1}^{2} } }{2}, \quad \beta_{k}=\frac{t_{k-1}-1}{t_{k} } \] 使用这种迭代策略,可以达到\(O(\frac{1}{k^2})\)的收敛率。
到目前位置,我们说的都是建立在平滑函数上的,而对于有非平滑函数项的目标函数,还需要做别的改进,也就是APG算法。
之前的PG算法,我们可以得到目标函数的一个上界: \[ \begin{aligned} \hat{F}\left(\boldsymbol{x}, \boldsymbol{x}_{k}\right) & \doteq f\left(\boldsymbol{x}_{k}\right)+\left\langle\nabla f\left(\boldsymbol{x}_{k}\right), \boldsymbol{x}-\boldsymbol{x}_{k}\right\rangle+\frac{L}{2}\left\|\boldsymbol{x}-\boldsymbol{x}_{k}\right\|_{2}^{2}+g(\boldsymbol{x}) \\ & \doteq \frac{L}{2}\left\|\boldsymbol{x}-\boldsymbol{w}_{k}\right\|_{2}^{2}+g(\boldsymbol{x})+\text { terms that do not depend on } \boldsymbol{x}, \end{aligned} \] 每一次迭代,实际上是最小化这个上界。
而对于Nesterov
momentum来说,也可以按照类似的方法来得到它对应的迭代策略: \[
\boldsymbol{x}_{k+1}=\operatorname{prox}_{g}\left(\boldsymbol{p}_{k+1}-\frac{1}{L}
\nabla f\left(\boldsymbol{p}_{k+1}\right)\right).
\] 这样我们就得到了APG算法的迭代策略:
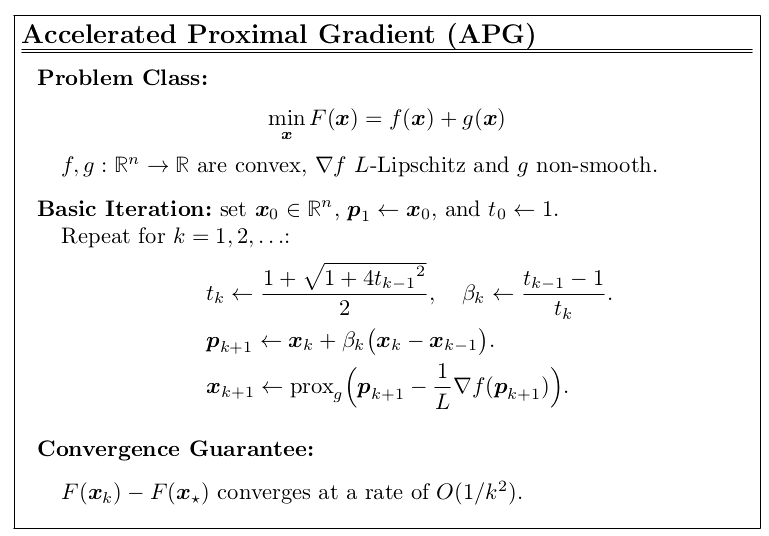
APG算法有\(O(\frac{1}{k^2})\)的收敛速率,比普通的梯度方法会好很多,更正式的定理为:
序列\({x_k}\)是通过APG策略对凸函数\(F(x) = f(x) +
g(x)\)进行优化的迭代步骤,而且\(f\)的梯度是Lipschitz的,如果\(F(x)\)有最小值对应的\(x_*\),那么对于任意的\(k>1\): \[
F\left(\boldsymbol{x}_{k}\right)-F\left(\boldsymbol{x}_{\star}\right)
\leq \frac{2
L\left\|\boldsymbol{x}_{0}-\boldsymbol{x}_{\star}\right\|_{2}^{2}
}{(k+1)^{2} }
\] 1. APG for Basis Pursuit Denoising
- APG for Stable Principal Component Pursuit
对于收敛性的证明,这里都不多赘述了。