压缩感知与稀疏模型——Sparse Signal Model
这篇博客介绍第二节课的一些内容。虽然第二章题目是Sparse Signal Model,但是这篇博客还介绍了很多高维下的内容,因此内容是比较杂的。不过这个也就是上课内容的记录,而不是完全按照博客题目分的。
从马毅老师的课上目前学到的最重要的收获,就是遇到一个要优化的问题时从几何的角度来思考,这样能够辅助理解很多东西。
L1-norm为什么能得到更稀疏的点相对于L2来说?
之前的利用sparse representation来进行超分辨的文章中,有一个点是,我们希望得到最稀疏的解,但是L0范数的问题是NP-hard的,因此无法解决,所以将L0问题放宽到了L1问题。我们都知道L1范数能得到比L2范数更稀疏的解,为什么呢?
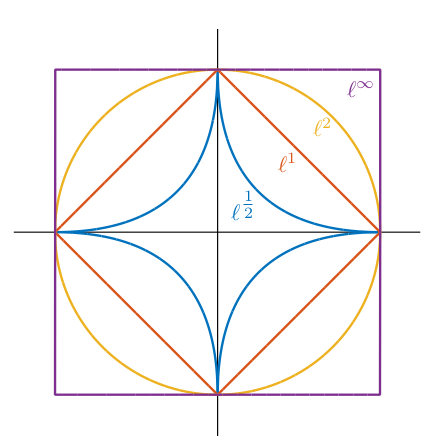
假如有下面待解决的问题: \[ \min \Vert x\Vert_0 \\\text{s.t. }y = Ax \] 对于0范数优化目标是最稀疏的解,是很容易理解的。因为0范数就是不为零的个数。通常解决方法是将上面的问题拓展到1范数: \[ \min \Vert x\Vert_1 \\\text{s.t. }y = Ax \] 现在我们想想,1范数的定义是什么:\(Vert x Vert_1 = \Vert x_1 +…+x_n \Vert\)。现在考虑三维的情况(更高的维度是类似的,但是我们画不出来),三维坐标下,L1范数的等高线是正8面体,而L2范数的等高线是球体的形状。而\(y=Ax\),映射到三维坐标下则是一个平面。
我们在找满足\(y=Ax\)的情况下最小的\(\Vert x \Vert_1\)值,实际上就是这个等高线不断扩充,最早正八面体与平面接触的那个点。
而从概率的角度上,正八面体的6个顶点与平面接触的概率是最高的,而这几个顶点相对于其他的点来说是更为稀疏的(只有一个entry非零,如果是边的话则是有两个entry非零)。而球体(L2-norm)边界与平面接触概率是一样的,因此L1范数应该能比L2得到更稀疏的解。
\(l^0,l^1,…l^\infty\)的可视化
高纬度下的奇怪现象
我们一直想当然的任务高纬度下的数据与低纬度下的是一样的规律,但是实际上维度变高的情况下会出现一些反直觉的现象。
想想二维的圆和三维的球,对于更高的维度,也有一个类似这样的球。我们称围绕直径一圈的圆为赤道,赤道周围计算得到的体积,就占据了整个球的大多数(99%)。这个现象非常的反直觉,而且任意一个这样的赤道,都能得到相同的结论。
在维度变高情况下,\(l^1\)小于某个值相对于\(l^\infty\)占得体积越来越小,当维度比较高的时候接近于0。这个是比较好理解的。
还有一些想不起来了。总之在高维情况下,反直觉的现象会出现很多,因此很多的定理都是实践发现后才开始证明。这体现了编程验证能力的重要性。
L0 norm的sparse solution
下面考虑这样一个问题。加入我们有观测量\(y \in \mathbb{R}^m\),并且知道矩阵\(A\),有\(y = Ax_0\),我们的目标是恢复\(x_0\)。如果我们知道\(x_0\)是稀疏的,那么选择最稀疏的解\(y = Ax\)是合理的,也就是我们需要解决的问题为: \[ \text{minimize } \Vert x\Vert_0\\ \text{subject to }Ax = y \] 这里定义一个符号: \[ \text{supp}(x) = \{i| x_i \ne 0\} \subset \{1,,,n\} \] 一个向量的support是一个集合,包含了entry不为0的索引。那么上面的问题就是让我们找到一个有最小support的向量。最容易想到的方法就是尝试所有的可能性。support集合一定是集合\(\{1,…,n\}\)的子集,因此我们遍历集合\(\{1,…,n\}\)的所有子集,现在有support集合\(I \subseteq \{1,…,n\}\),那么我们可以得到下面一组等式: \[ A_Ix_I = y \] 这里\(A_I \in \mathbb R^{m \times \vert I\vert}\)是矩阵\(A\)的子矩阵,由entry索引为集合\(I\)中的向量组成。这样我们尝试解出\(x_I \in \mathbb R^{\vert I\vert}\)。如果解存在,将其他的entry设为0即可。算法描述如下图:
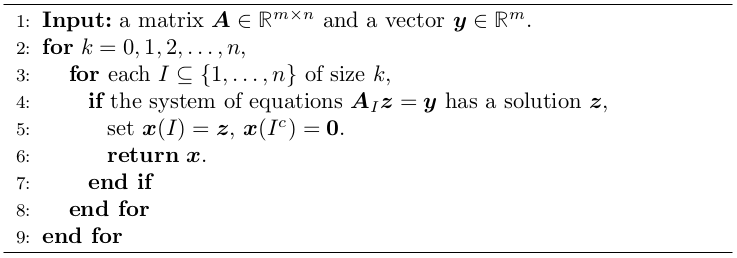
利用这个算法做了随机实验,首先随机生成\(x_0,A\),其中\(x_0\)是稀疏的。然后根据\(y=Ax_0\)得到观察量\(y\),接着利用上面遍历的算法对\(x_0\)进行恢复。得到下面的图:

可以发现只要原先向量中非零个数\(k\)不要太大,也就是足够稀疏,基本上总是能成功找到解。上述实验的size是\(5 \times 12\)。出现这种现象的原因是什么,有没有数学上的解释?
为了解释为什么L0范数最小化能成功得到解,首先思考一下什么情况下是无法得到解的。假如\(x_0 \in null(A)\),也就是属于\(A\)矩阵的零空间,那么: \[ Ax_0 = 0 = A0 \] 对于上面的情况,最小化L0范数得到的解永远是0向量,无法恢复得到\(x_0\)。因此我们可以推测,如果\(null(A)\)包含了稀疏向量,那么我们可能无法恢复原来的稀疏向量。实际上,反过来也是正确的,如果\(null(A)\)不包含稀疏向量,通过解决L0最小化总是能恢复足够稀疏的原向量。上面的陈述有点让人看不懂,用数学语言说明并证明一下:
现在有原向量\(\Vert x_0\Vert \leq k\),并且有: \[ (*) \text{The only } \sigma \in null(A)\text{ with }\Vert \sigma\Vert_0 \leq 2k \text{ is }\sigma = 0. \] 那么如果\(x_0\)就一定可以被恢复。
首先,假如我们估计量为\(\hat x\),那么由于\(\hat x\)是根据最小化L0范数得到的,因此: \[ \Vert\hat x\Vert_0 \leq \Vert x_0\Vert_0 \leq k \] 定义估计误差为: \[ \epsilon = \hat x - x_0 \] 可以得到: \[ \begin{aligned} \Vert \epsilon\Vert_0 &= \Vert \hat x - x_0\Vert_0 \\ &\leq \Vert \hat x \Vert_0 + \Vert x_0\Vert_0\\ &\leq 2k \end{aligned} \] 而: \[ A\epsilon = A(\hat x - x_0) = y - y = 0 \] 那么根据\((*)\),我们可以得到:\(\epsilon = \sigma = 0\)。也就是最小化L0范数成功恢复了原来的稀疏向量。
而\((*)\)是矩阵\(A\)的一个性质,因此一个好的矩阵\(A\)应该是零空间没有稀疏向量的。实际上,要保持这个性质的充要条件是,任意矩阵A的\(2k\)列是线性独立的。
对于上述现象在线性代数中有一个定理,引入矩阵新的概念Kruskal rank(\(krank(A)\)),指的是最大的\(r\),\(A\)的任意\(r\)列都是线性独立的。
上述理论描述为:
假定\(y = Ax_0\),而且有\(\Vert x_0\Vert_0 \leq \frac{1}{2} krank (A)\),那么\(x_0\)也是唯一下面最小化问题的唯一最优解: \[ \text{minimize }\Vert x\Vert_0\\ \text{subject to } Ax = y \] ### Projected Subgradient Decent for \(l^1\) minimization
对于\(l^1\)的最小化的解决实际上与我们经常遇到的\(l^2\)范数是有较大区别的。现在有下面这样的最小化问题: \[ \text{minimize } \Vert x\Vert _1\\ \text{subject to } Ax = y \] 上面的问题有两个需要解决的困难:
- nontrivial constraints(非平凡约束):需要满足\(Ax = y\).
- nondifferentiable objective(不可导的目标函数)。\(l^1\)问题不是可导函数,局部会出现不可导的情况。下面对这两个问题一一进行分析解决。
Constraints
解决Constraints的最简单的方法是使用投影梯度。所有满足约束的向量,构成一个子空间(subspace),我们计算出来的梯度可以投影到这个子空间上,利用投影之后的梯度来进行梯度下降,就是投影梯度下降的思想。一般来说,带有约束的优化问题可以写成下面的形式: \[ \text{minimize } f(x)\\ \text{subject to } x \in C \] 其中\(C\)是一个约束集合,一般的梯度下降算法迭代步骤为: \[ x_{k+1} = x_k - t_k\nabla f(x_k) \] 而投影梯度算法就是将结果\(x_{k+1}\)投影到\(C\)上。一个点\(z\)在集合\(C\)上的投影也就是集合上距离\(z\)最近的点,定义为: \[ \mathcal{P}_{C}[\boldsymbol{z}]=\arg \min _{\boldsymbol{x} \in C} \frac{1}{2}\|\boldsymbol{z}-\boldsymbol{x}\|_{2}^{2} \equiv h(\boldsymbol{x}) \] 对于一般的\(C\),投影可能不存在或者不唯一,但是对于凸集合来说,投影是很好的被定义了,而且有很多有用的性质。如果\(A\)是行满秩的,那么集合\(C = \{x|Ax = y\}\)上的投影有一个非常简单的形式: \[ \mathcal{P}_{ \{\boldsymbol{x} | \boldsymbol{A} \boldsymbol{x}=\boldsymbol{y} \} }[\boldsymbol{z}]=\boldsymbol{z}-\boldsymbol{A}^{T}\left(\boldsymbol{A} \boldsymbol{A}^{T}\right)^{-1}[\boldsymbol{A} \boldsymbol{z}-\boldsymbol{y}]. \] 有兴趣了可以尝试推导一下上式的计算过程。
Nondifferentiability
对于不可导问题,因为我们优化的问题虽然不可导,但是依然是凸函数,因此我们可以使用次梯度。这里简单说一下什么是次梯度,实际上一张图就可以看明白了:
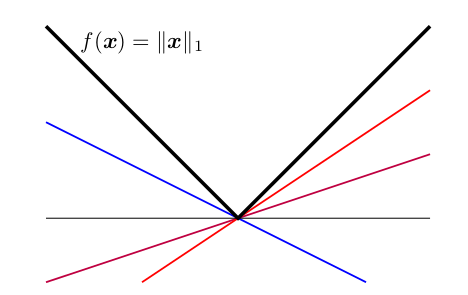
从几何的角度上来说,我们希望梯度提供一个迭代的方向,但是由于不可导,梯度并不存在,但是实际上很多方向都可以作为迭代方向的估计,如上图中,红线的斜率就是次梯度。
对于凸函数,次梯度\(c\)需要满足: \[ f(x) - f(x_0) \geq c(x - x_0) \] 可以看到次梯度一般不是唯一的而是一个区间,实际上我们对不可导的点左右求极限: \[ \begin{aligned} a &=\lim _{x \rightarrow x_{0}^{-} } \frac{f(x)-f\left(x_{0}\right)}{x-x_{0} } \\ b &=\lim _{x \rightarrow x_{0}^{+} } \frac{f(x)-f\left(x_{0}\right)}{x-x_{0} } \end{aligned}\\ a \leq b \] 那么处于\([a,b]\)之间的都可以称为次梯度。
对于次梯度更严格的定义如下:
\(f: \mathbb R ^n \rightarrow \mathbb
R\)是一个凸函数。那么\(f\)在\(x_0\)点的次梯度为满足下式的任意\(u\): \[
f(\boldsymbol{x}) \geq
f\left(\boldsymbol{x}_{0}\right)+\left\langle\boldsymbol{u},
\boldsymbol{x}-\boldsymbol{x}_{0}\right\rangle, \quad \forall
\boldsymbol{x}.
\] 而次导数是在该点所有次梯度的集合: \[
\partial f\left(\boldsymbol{x}_{0}\right)=\left\{\boldsymbol{u} |
\forall \boldsymbol{x} \in \mathbb{R}^{n}, f(\boldsymbol{x}) \geq
f\left(\boldsymbol{x}_{0}\right)+\left\langle\boldsymbol{u},
\boldsymbol{x}-\boldsymbol{x}_{0}\right\rangle\right\}.
\] 因此对于次梯度下降,迭代步骤为: \[
\boldsymbol{x}_{k+1}=\boldsymbol{x}_{k}-t_{k} \boldsymbol{g}_{k},
\boldsymbol{g}_{k} \in \partial f\left(\boldsymbol{x}_{k}\right).
\] 截止到这里,我们就可以推导出次梯度下降算法了: \[
\boldsymbol{x}_{k+1}=\mathcal{P}_{\mathcal{C}
}\left[\boldsymbol{x}_{k}-t_{k} \boldsymbol{g}_{k}\right], \quad
\boldsymbol{g}_{k} \in \partial f\left(\boldsymbol{x}_{k}\right)
\] 由于次梯度是无穷多个的,对于一维的变量,\(\vert x\vert\)在\(x=0\)的次梯度为区间\([-1,1]\)的任何一个数字都可以,也就是:(x)
=[-1,1].
我们用$(x) \(来表示次导数。对于多维向量,有下面的引理: **Lemma**: 现在有\)xR^n$, \(I = \text{supp}(x)\),那么: \[ \partial\|\cdot\|_{1}(\boldsymbol{x})=\left\{\boldsymbol{v} \in \mathbb{R}^{n} | \boldsymbol{P}_{I} \boldsymbol{v}=\operatorname{sign}(\boldsymbol{x}),\|\boldsymbol{v}\|_{\infty} \leq 1\right\} \] 这里,\(\boldsymbol{P}_{I} \in \mathbb{R}^{n \times n}\)是坐标\(I\)的正交投影: \[ \left[\boldsymbol{P}_{I} \boldsymbol{v}\right](j)=\left\{\begin{array}{ll}{\boldsymbol{v}_{j} } & {j \in I} \\ {0} & {j \notin I}\end{array}\right. \] 证明这里就不赘述了。
到了这里我们可以总结出次梯度下降算法,用来解决\(l^1\)的minimization(注:下图中\(A^* = A^T\),表示转置):

Exprimental Result
都说用\(l^1\)来解决稀疏解是相对有效的方法,因此在这里类似于\(l^0\),做了一个实验,看\(l^1\)对恢复稀疏向量上表现如何。我们知道在\(l^0\)的情况下,只要满足一定条件它一定能恢复原来的稀疏向量。使用同样的方法设计实验,维度是\(200\times 500\),非零entry个数\(k\)从0到500,算法使用上述提到的投影次梯度下降。这其中,首先随机生成\(A,x\),根据\(y=Ax\)得到\(y\),再试图用上述算法去恢复\(x\)。由于数值精度问题,计算机中完全等于0是比较困难一件事,因此设定一个阈值,只要小于该阈值就视为零。算法的代码如下:
1 |
# A implementation of Projected Subgradient Decent |
最后结果如图:
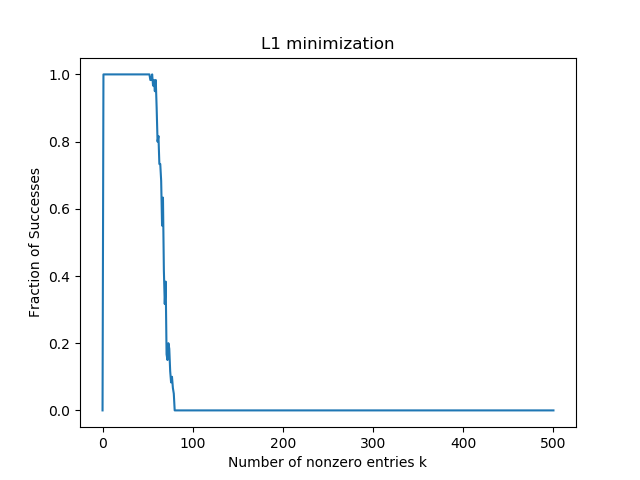
这个图不是非常的顺滑,不过有了大致的趋势,可能是迭代次数不够导致的,也不知道是不是实现的问题。一般来说这个曲线如下图:
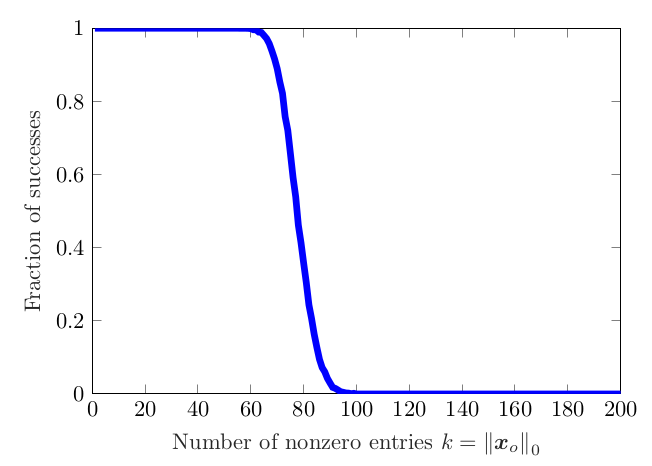
可以看到在稀疏性很大时候,\(l^1\)也几乎总是能恢复到原始的向量。这体现了\(l^1\)范数在解决稀疏问题的优越性。不过上述程序运行速度很慢,因为投影次梯度收敛速度很慢。之后会介绍更快速的优化算法。