踩过的坑——ROS安装
踩过的坑系列是一些没什么技术含量却把人折磨的要死的过程。就做个记录,可能会有很多错误,不必当真。
关于ROS的安装。ROS是机器人操作系统Robot OS的缩写,ROS特别坑的地方在于对于不同的linux系统有不同的版本。
| ROS发布日期 | ROS版本 | 对应Ubutnu版本 |
|---|---|---|
| 2018.5 | ROS Medolic | Ubuntu 18.04 (Bionic)/Ubuntu 17.10 (Artful)/Windows/ Mac OS X /Andriod |
| 2016.3 | ROS Kinetic Kame | Ubuntu 16.04 (Xenial) / Ubuntu 15.10 (Wily) |
| 2015.3 | ROS Jade Turtle | Ubuntu 15.04 (Wily) / Ubuntu LTS 14.04 (Trusty) |
| 2014.7 | ROS Indigo Igloo | Ubuntu 14.04 (Trusty) |
| 2013.9 | ROS Hydro Medusa | Ubuntu 12.04 LTS (Precise) |
| 2012.12 | ROS Groovy Galapagos | Ubuntu 12.04 (Precise) |
| … | … | … |
然而,我在18.04的机器上安装之后(过程很曲折,理论上不需要这样,一直会出现包依赖的问题,最后用aptitude解决),和用得代码并不对应,我需要的是kinetic版本的,因此需要把系统换成ubuntu 16.04。对于系统的安装也有坑,有时间再记录。
实际上安装ROS过程也不复杂,只要你的系统什么的都是对应的,理论上没有什么大问题:
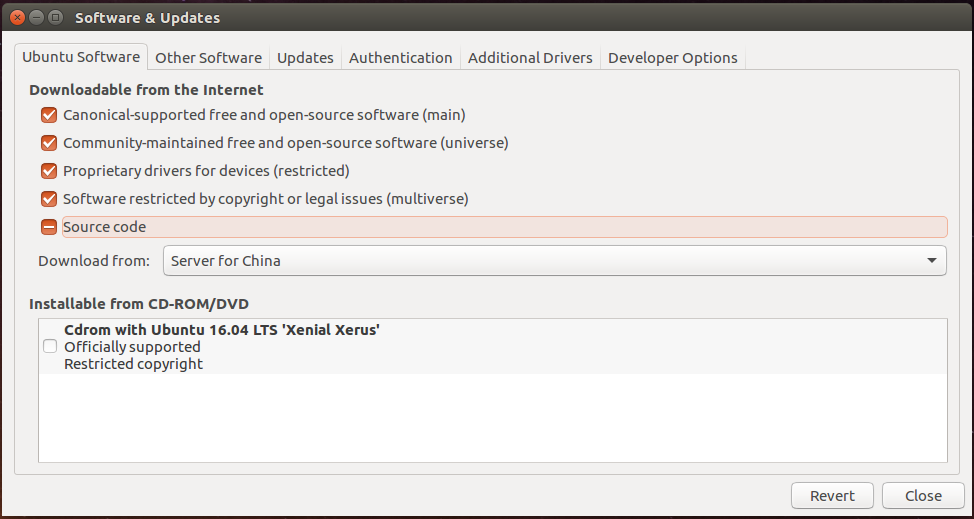
设置软件和更新,保证restricted,universe,multiverse前是打钩的。
添加源:
1
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置秘钥:
1 |
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116 |
更新源:
1
sudo apt-get update
安装ros-kinetic:
1
sudo apt-get install ros-kinetic-desktop-full
保证网络要好,如果对于外网访问很差可能需要使用阿里的镜像,这个设置请去查。安装时间应该会比较久。
初始化ros:
1
2sudo rosdep init
rosdep update
设置环境变量:
1 |
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc |
测试安装成功:
1
roscore
出现了started core service表示安装成功。